[PR]
搾乳ロボットVMS™の新しい手法「バッチミルキング方式」の導入
PICK UP

過去20年以上にわたり、デラバル の搾乳ロボットVMS™シリーズは世界中の牧場で導入されてきました。ユーザー様の中には、労働力の削減、牧場内外での管理・作業の柔軟性向上、貴重な個別の牛のデータ、生乳生産量の増加、乳質の改善、牛の健康状態の改善など、さまざまなメリットを実感している方が多くいらっしゃいます。
搾乳ロボットの主なメリットは、牛に自主性を提供し、搾乳の開始タイミングを牛自身が決めることができる点です。これは、牛自身が自由を選択できるフリートラフィック、または誘導型トラフィックの両方で容易に実行できます。
バッチミルキング方式とは?
バッチミルキング方式は、大きな牛群をロボットで搾乳する新しい方法として世界中で注目を集めている手法で、従来のパーラーやロータリーによる搾乳と同形態の考え方です。つまり、搾乳作業自体は搾乳ロボットによって自動化されますが、パーラーやロータリーによる搾乳時のルーチンをそのまま活かすことができるということです。
バッチミルキング方式の仕組みと牛群
バッチミルキング方式では、牛群をグループに分ける必要があります。その後、パーラー搾乳と同じように、搾乳者が各グループを1群ずつ搾乳舎に誘導します。
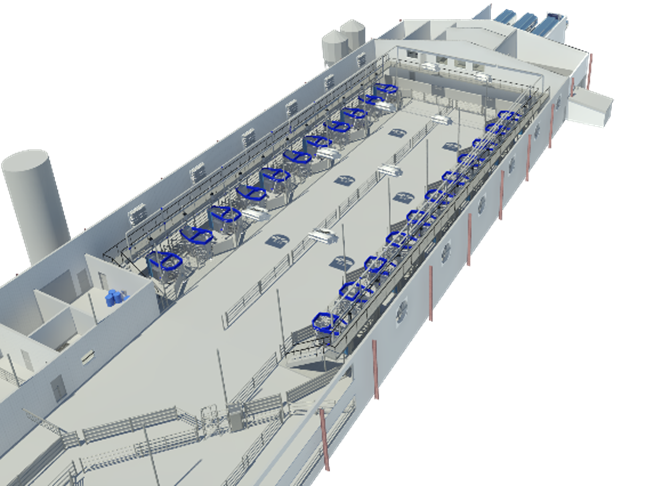
この方式で人気のある牛舎レイアウトの一つは、複数のVMSユニットを2列に並べたものです。このレイアウトはパラレルパーラーを模しており、ロボットとロボットの間に中央のホールディングエリアがあります。搾乳が終わると、すべての牛はロボットの右側から出て、搾乳舎の外周を出口レーンに沿って進み、セレクションゲートに到達します。このゲートでは、牛をそれぞれの選別エリアに誘導することができます。
酪農家は従来の搾乳作業と同じように、泌乳ステージ別に牛をグループ分けして搾乳することができます。移行の観点からも、従来の搾乳作業における一般的なルーチンの変更は不要です。スタッフのトレーニングも最小限で済み、牧場内での大きな変化と適応が少ないという酪農家にとってのメリットもあります。
また、酪農家にとって大きな関心の1つとなる給飼方法は、牧場がTMRによる給飼方法を維持できるというメリットがあります。通常、ロボット内で給飼される濃厚飼料は栄養補給のためではなくロボット入室の動機として使用されるため、PMRに移行する必要はありません。このため、牧場は自家飼料を最大限に活用できます。
事例紹介: ランチョ・ペッパー牧場(アメリカ・テキサス州)
ランチョ・ペッパー牧場は、VMSバッチミルキング方式を導入したアメリカ初の牧場です。2022年、有機酪農家である同牧場はテキサス州ダブリンにある牛舎で、2000頭の牛をバッチミルキング方式で搾乳するために22台のデラバル VMS™V300を導入しました。

この牧場がVMSによるバッチミルキング方式を選択した理由は、VMSが個々の牛のデータを取得でき、従来のパーラーと同じ頭数の牛を搾乳するのに必要な労働力が少なくて済むことです。それぞれの牛がどのようなパフォーマンスなのかを確認し、その指標に基づいて意思決定ができる点も、牛群管理に必要な時間短縮に役立っています。
同牧場マネージャーは「基本的にはパラレルパーラー搾乳舎と同じ建物で、その中の両側に搾乳のためのVMS(ユニット)と給飼装置がある構造になっており、これまで人間が行なっていた作業をVMSが担っています。牛舎に戻る退出経路にはセレクションゲートがあるので、牛はいつ搾乳舎を出ても元のペンに戻ることができます。この搾乳スタイルになって、私が今まで扱ってきた(見てきた)どのパーラーで搾乳するよりも、牛達がリラックスしていると感じます。私は間違いなく、次もこの方式を取り入れたいと思います」と言います。
バッチミルキング方式がもたらす酪農の未来
世界各地で労働コストの上昇と労働力不足が大きな課題となりつつあります。
バッチミルキング方式は、搾乳ロボットが持つ利点を最大限に生かしながらも、意思決定を容易にし、人員の効率化を図ることが可能です。
このコンセプトは、より多くの酪農家が搾乳ロボットのメリットと、長年慣れ親しんできた管理スタイルを組み合わせるという新たな視点から、今後も業界が持つ課題解決の一つの選択肢となり得るでしょう。
PROFILE/ 企業プロフィール
デラバル株式会社
創立から140年を超えた歴史ある酪農関連機器メーカーです。スウェーデンに本社を構え、持続可能な酪農業と食料生産への貢献を目指し、搾乳ロボットVMS™V300をはじめとする環境負荷への影響に配慮した製品開発と提案、アフターサービスを提供しています。